El quattro para el paletizador
Más empuje en el embalaje, pero sin presión de retención: Gracias a un paletizador con control inteligente mediante sensores ópticos, los fabricantes de bebidas ahorran tiempo y mano de obra. Además de eso, son recompensados con una alta fiabilidad del proceso.
Con el InnoDry Block de KHS, una solución de embalaje y paletizado que prescinde completamente de guías en el transporte de cajas está disponible desde hace dos años. Esto es posible, por un lado, mediante un buffer flexible detrás de la máquina enfardadora, que ajusta continuamente su tamaño según la cantidad de cajas. Por otro lado, un sensor óptico reconoce las cajas que están alineadas incorrectamente durante el transporte sin barandas, y pone esta información a disposición de los robots. En concordancia, los robots luego ajustan su posición de acceso a las cajas. Sin necesidad de que los packs se atasquen, ensamblan las cajas en el formato correspondiente a la camada. Esto aumenta la estabilidad del palet, de modo que que los packs llegan al supermercado de forma segura.
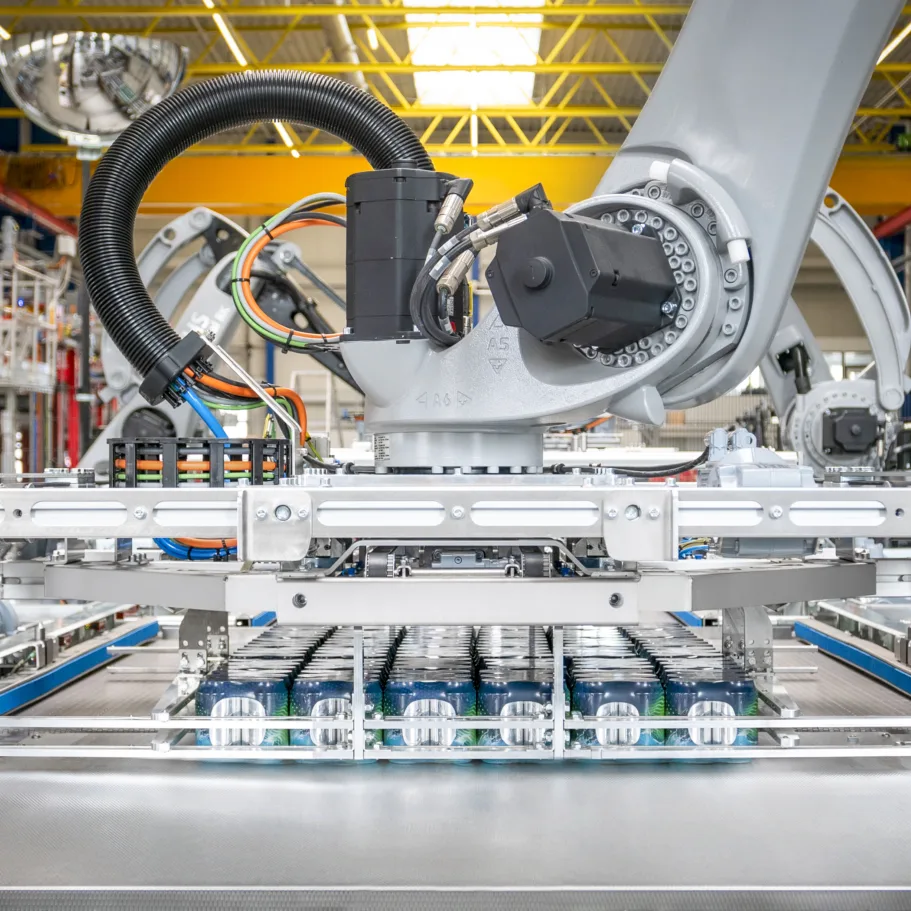
Si la alineación en el InnoDry Block se realizó previamente de forma individual para cada pack, el sistema de manipulación ahora también se puede utilizar en el rango de alto rendimiento gracias a un nuevo desarrollo por parte de los expertos de KHS en el área de paletizado en Worms: Con la alimentación de cajas exenta de presión y sin barandas, el brazo de agarre del robot puede manipular y colocar simultáneamente dos o más cajas. Christoph Wiesenack, gerente de productos de paletizado, describe cuál es la condición previa más importante para esto: “Al final de los transportadores, instalamos adicionalmente cuatro cintas transportadoras lisas consecutivas, cada una de solo unos 30 centímetros de largo, entre la cadena de cinta modular engomada y la mesa de agrupamiento. Su velocidad se controla individualmente en función de la información proporcionada por un sensor óptico. La cámara funciona en todo tipo de condiciones de iluminación y con una amplia variedad de propiedades ópticas, colores o materiales del embalaje o de los envases. Se genera información en 3D, que un algoritmo previamente programado convierte en un pulso de control. Esto acelera o disminuye la velocidad de las cajas, dependiendo de cómo el sistema de robot lo necesite para realizar su tarea. Esto hace que los packs se junten o se separen. De esta manera, se transportan a una distancia óptima entre sí y el robot puede acceder a ellos según lo requiera el proceso de producción”.
»La ausencia de barandas hace que cambiar de formato sea mucho más fácil, porque hemos eliminado una posible fuente de errores«.

Gerente de Producto de Paletizado, KHS
Cuatro cintas, cuatro velocidades
El principio puede ser simple, afirma Wiesenack, pero la programación de los algoritmos correspondientes se realizó con cierto esfuerzo. Incluso si él y sus colegas no reinventaron el paletizado, como admite con una sonrisa, Wiesenack cree que pueden estar orgullosos de su desempeño. El equipo ha puesto los elementos existentes en la industria en un contexto completamente nuevo para que ahora sean accionados de manera inteligente por cuatro servomotores que utilizan algoritmos dinámicos. El camino hacia este resultado, como suele ser el caso con los nuevos desarrollos, no estuvo exento de desafíos ni de retrocesos menores: “En lo que respecta a la programación, habíamos asumido que podíamos facilitar nuestro trabajo y garantizar una ejecución estable, para lo cual restringimos demasiado las condiciones marginales. Esto era demasiado optimista”.
Pero ahora todos están altamente satisfechos con el resultado. A diferencia de otros sistemas convencionales, las cajas ahora se pueden alimentar al paletizador sin presión de retención. Esto ofrece dos grandes ventajas para los fabricantes de bebidas, como explica Wiesenack: “Por un lado, los envases y las cajas están naturalmente expuestos a un esfuerzo mecánico significativamente menor debido al manejo suave sin aceleración ni frenado frecuentes. Por otro lado, ya no necesitamos barandas que tengan que proteger las cajas contra caídas laterales”. El segundo aspecto en particular hace que los clientes presten atención y que aguarden ansiosamente el nuevo producto: “La ausencia de barandas hace que sea mucho más fácil cambiar los formatos”, dice Wiesenack. “Si se tiene que ajustar una baranda cada cuatro metros para un transportador de 20 o 30 metros de longitud, esto consume bastante tiempo. Se deben aflojar las palancas de sujeción, ajustar los rieles de guía y bloquear las palancas nuevamente”. Esto ahorra entre cuatro y siete minutos de tiempo por cada tramo de transporte de diez metros. Además, se elimina una posible fuente de error, como Wiesenack afirma: “Si no se tiene que ajustar nada, no existen equivocaciones”.

Con la ayuda de cuatro cintas transportadoras cortas, controladas electrónicamente de forma individual, los packs se colocan a la distancia correcta para que el robot acceda a ellos.
Para no retornables y retornables
Es probable que el nuevo sistema sea cada vez más interesante para los clientes que, según el rendimiento de la línea y el tamaño de la caja, utilizan cada vez más un alimentador de cajas de uno, dos o incluso tres carriles alternativamente. E incluso si la nueva tecnología está dirigida principalmente al paletizado no retornable de packs y cajas, hay muchos formatos diferentes y cambios de formato frecuentes y, por supuesto, también debería ser posible emplearla en el área de retornables.
En resumen, Wiesenack afirma con satisfacción: “La nueva tecnología se basa en el principio probado del InnoDry Block y, por primera vez, lo pone a disposición del sector de alto rendimiento en una forma más desarrollada”.